インフラ点検等を支援するドローン関連ソフトウエア開発
概要
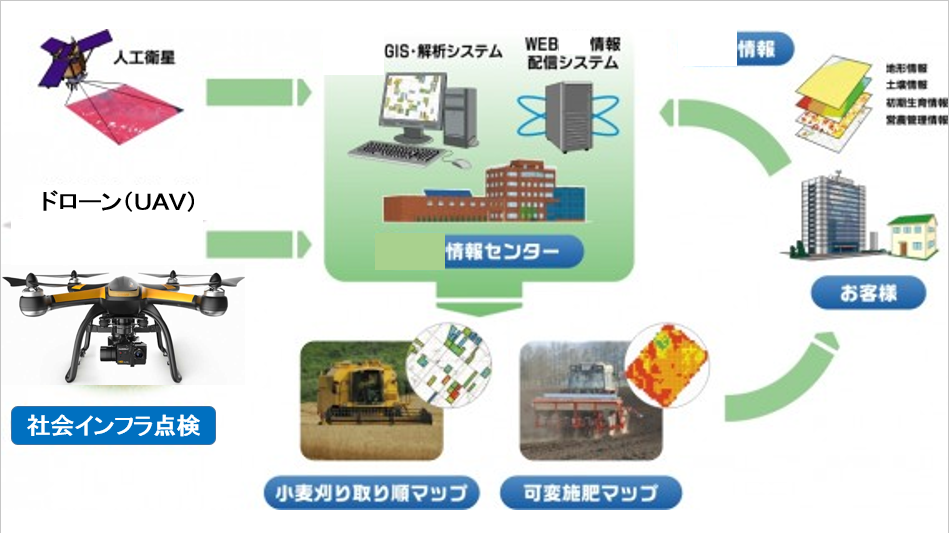
従来の走行ロボット活用によるインフラ点検からドローンを利用し、効率的な点検作業を提供するフライトコントローラー組込みソフト開発を行う。
フライトコントローラー組込みソフトは、ドローンの安定飛行、自動飛行を実現する必要な姿勢制御、位置推定を行うものである。
姿勢制御、位置推定の技術から、高精度な位置推定が必要なカーナビ、自動運転への利用、可能性を計画する。
背景
インフラ点検担当者の高齢化、減少とインフラ耐用年数が50年を経過し、修復への対応が迫られている。
インフラ点検を担当する自治体では、担当者の「勘と経験による点検作業」から、情報を共有できる「客観的データに基づく点検」への転換が必要とされている。
開発プロジェクト
1. ドローン飛行のフライトコントローラー組込みソフト開発
姿勢制御、位置推定への新規技術開発
2. カーナビ、自動運転への技術開発
衛星によるGPS利用、GPSが利用できない環境下でのドローン飛行の安定飛行実現